机器人手臂零组件加工
我们拥有多台进口的五轴、四轴和三轴加工中心以及CNC精雕机,并配有三次元,2.5次元投影仪、金属分析仪等高精度检验仪器,不论是从工艺、精度还是品质,我们都能提供极具性价比的解决方案。
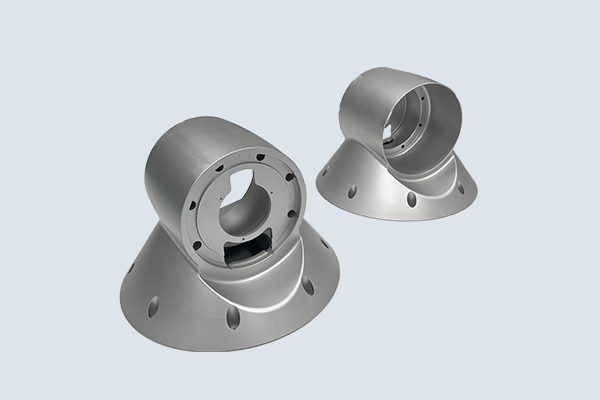
凯路精密深耕机器人精密零件及组件多年,为工业制造、医疗行业、物流仓储、航空航天等领域的关节型机器人、坐标型机器人、运输机器人,人形机器人提供包括外壳、结构件、齿轮、紧固件、转轴部件、底座部件等零件和组件,支持定制加工多品种、小批量的机器人零件。
①:严格执行ISO9001、ISO13485质量管理体系,保证机器人零件及其相关组件的适配性、可靠性和精密性。
②:机加工精度可以做到领先行业的±0.005mm,尤其擅长高端机器人上的精细零件,确保每个组件的精确适配。



不论是需要反复消毒灭菌还是生物相容性的材料,都可以做到高精度安全稳定的加工,并且具备可追溯性!
哪些材料适合机器人零件应用?
钛金属:用于关节机器人、医疗手术机器人的生物相容性材料。重量轻、强度高、可 3D 打印、耐腐蚀。
不锈钢材料:医疗手术机器人、生物机器人的理想材料。不锈钢可进行高抛光,因此抗污染,易于消毒。
尼龙和ABS(聚氨酯): 常用于机器人电子保护壳体、机器人转轴壳体,价格十分优势,普遍适用性强。
TPE 和硅胶:密封件和配件适用于定制装配。它贴合机器人部件组装拼接且耐化学腐蚀。

尺寸公差:
机器人转轴零件尺寸公差可以做到φ40(+0.03/+0.01)
形状公差:
孔的位置精度是0.02mm
位置度公差:
位置度公差为0.01mm
从 现 在 起 ,让 凯 路 精 密 为 您 定 制 加 工 机器人 零 件!
机器人的组成结构有什么?
1.手臂结构:工业机器人的手臂结构类似于人的手臂,用于搬运和操作物体。它通常由多段关节构成,这些关节可以进行旋转和伸缩。手臂结构可以根据不同的任务来设计,手臂的长度、关节的自由度和负载能力等可以根据实际需求进行调整。
2.底座结构:底座结构是工业机器人的支撑部分,它承载整个机器人和工作负载的重量,并提供机器人的旋转能力。底座通常由电机和减速器组成,通过控制电机的旋转实现整体机器人的转动。
3.关节结构:关节结构是工业机器人手臂各关节连接的部分,它具有旋转和转动的能力。关节结构通常由电机、减速器和编码器等组成,电机提供动力,减速器提供转动和转动的精度,编码器用于反馈位置和速度等参数。
4.手持器结构:手持器结构是机器人手臂的末端装置,用于夹取和操纵物体。手持器通常由夹爪、吸盘、焊枪等组成,它们可以根据不同的任务和工作环境进行选择和装配。
5.支撑结构:支撑结构是机器人的框架和支撑部分,它提供机器人的稳定性和强度。支撑结构通常由铝合金、碳纤维等材料制成,具有轻巧、刚性和耐用等特点。
机器人零件加工的注意事项有哪些?
高精度要求:输液泵对精度要求非常高。零件的尺寸、表面光洁度、装配精度等方面都需要达到严格的要求,保证安全稳定的完成精确的医疗手术,必须要具备先进的加工技术和设备,以及经验丰富的工程师和技术人员。
材料选择:输液泵零件需要优秀的化学性能和机械强度,从而在经受长期反复消毒的情况下不受影响,另外,在接触人体组织的部分,需要采用具备生物相容性并且具备足够强度的材料。
复杂度和几何形状:输液泵的零件很大一部分都具有复杂的形状,比如曲面、异形、弧度,这类零件通常都是用五轴设备来加工的,需要很高的加工水准。